基于時(shí)空濾波方法的
多源遙感數(shù)據(jù)融合算法
神州信息
劉晶 李佳輝

1.
前言
高時(shí)空分辨率遙感數(shù)據(jù)在監(jiān)測(cè)土地變化,、作物生長(zhǎng)及物候參數(shù)反演等方面具有重要的作用,,遙感數(shù)據(jù)的時(shí)空精細(xì)度成為了制約其在各領(lǐng)域應(yīng)用的重要因素。 受技術(shù)限制的影響,,傳感器在獲取地面數(shù)據(jù)時(shí)通常難以同時(shí)兼顧到數(shù)據(jù)的空間分辨率和時(shí)間分辨率,。對(duì)于高時(shí)間分辨率的數(shù)據(jù)可以得到豐富的地表細(xì)節(jié)信息,,但由于其重訪周期長(zhǎng),再加上地面氣象因素( 云,、雨和雪等) 對(duì)傳感器成像的影響,,造成了單個(gè)傳感器有效數(shù)據(jù)重訪周期的延長(zhǎng),使得監(jiān)測(cè)具有很大程度上的“時(shí)空數(shù)據(jù)缺失”,,導(dǎo)致監(jiān)測(cè)研究中基礎(chǔ)觀測(cè)數(shù)據(jù)出現(xiàn)“空窗”,,在研究的關(guān)鍵期不能滿足連續(xù)動(dòng)態(tài)跟蹤監(jiān)測(cè)的要求,。而對(duì)于低分辨遙感影像數(shù),雖然具有較高的時(shí)間分辨率,,但是其空間分辨率太低,,對(duì)于我們監(jiān)測(cè)較小面積種植作物區(qū)域具有很大影響。
為滿足地表信息遙感動(dòng)態(tài)監(jiān)測(cè)同時(shí)對(duì)具有高空間分辨率和高時(shí)間分辨率特征遙感數(shù)據(jù)的需求,,一些學(xué)者提出了一種能夠綜合高空間分辨率遙感數(shù)據(jù)的空間分辨率特征和高時(shí)間分辨率遙感數(shù)據(jù)的時(shí)間分辨率特征的技術(shù),,即遙感數(shù)據(jù)時(shí)空融合技術(shù)。
2.
多源時(shí)空數(shù)據(jù)融合技術(shù)
針對(duì)遙感數(shù)據(jù)時(shí)空融合方法,,國(guó)內(nèi)外學(xué)者進(jìn)行了大量研究,。根據(jù)算法原理的不同,遙感數(shù)據(jù)時(shí)空融合方法可以分為2類,,即基于變換的模型和基于像元重構(gòu)的模型,。國(guó)內(nèi)外大部分遙感數(shù)據(jù)時(shí)空融合模型是基于像元分解重構(gòu)技術(shù)的,其基本思想是通過(guò)一定的規(guī)則選擇目標(biāo)像元周邊的像元參與目標(biāo)像元的重構(gòu),。常用的時(shí)空融合方法有STARFM(Spatial and Temporal Adaptive Reflectance Fusion Model)和ESTARFM(Enhanced Spatial and Temporal Adaptive Reflectance Fusion Model)兩種方法,。
STARFM方法主要用于融合Landsat和MODIS影像, 生成與MODIS影像相應(yīng)時(shí)間的模擬Landsat影像, 能較為準(zhǔn)確地預(yù)測(cè)出高時(shí)空分辨率影像的反射率數(shù)據(jù)。但STARFM算法的預(yù)測(cè)結(jié)果受Landsat數(shù)據(jù)影響, 若Landsat影像中未記錄地表覆蓋在較短時(shí)間內(nèi)的劇烈變化, 那么預(yù)測(cè)的影像也不會(huì)表征該情況,,不能監(jiān)測(cè)地表突變的情況,。ESTARFM算法, 主要使用兩期對(duì)應(yīng)觀測(cè)時(shí)間的高空間分辨率、低時(shí)間分辨率影像和低空間分辨率,、高時(shí)間分辨率影像, 以及在預(yù)測(cè)日期獲取的低空間分辨率影像獲取對(duì)應(yīng)時(shí)間的模擬高空間分辨率影像,,該算法考慮了像元的異質(zhì)性,引入純凈像元與混合像元在一段時(shí)間內(nèi)反射率變化的轉(zhuǎn)換系數(shù), 提高了模型在異質(zhì)性較高區(qū)域的反射率融合精度, 在小區(qū)域?qū)嶒?yàn)中有較好的效果,大區(qū)域效果還有待驗(yàn)證,。這兩種算法對(duì)于變化情況較大且未記錄在基準(zhǔn)影像的區(qū)域預(yù)測(cè)精度較低,,且算法精度受基準(zhǔn)影像的數(shù)據(jù)質(zhì)量影響嚴(yán)重,如需構(gòu)建大范圍的無(wú)云數(shù)據(jù),,需要保證每一個(gè)區(qū)域都能找到無(wú)云覆蓋的參考數(shù)據(jù),,這是非常困難的,特別是在大量云霧覆蓋區(qū)域,,一年內(nèi)都極少有無(wú)云數(shù)據(jù),,具有一定的局限性,不能滿足我們對(duì)全國(guó)范圍內(nèi)作物進(jìn)行動(dòng)態(tài)監(jiān)測(cè)的需求,。
對(duì)于作物監(jiān)測(cè),,我們主要需要作物關(guān)鍵物候期的時(shí)序性的高分辨率遙感數(shù)據(jù),那么為了滿足我們的監(jiān)測(cè)需求,,具備全國(guó)作物動(dòng)態(tài)監(jiān)測(cè)的能力,,我們自研了SSTARFM(Self-tuning spatiotemporal adaptive reflectance fusion model)的時(shí)空遙感數(shù)據(jù)融合算法,該算法基于權(quán)重濾波與多源數(shù)據(jù)歸一化方法,根據(jù)不同尺度影像數(shù)據(jù)的時(shí)間空間特征,,構(gòu)建全時(shí)序,、全空間范圍內(nèi)的無(wú)云長(zhǎng)勢(shì)產(chǎn)品,完成了多源異構(gòu)數(shù)據(jù)的統(tǒng)一,在保證高精度的條件下輸出高時(shí)間高分辨率的監(jiān)測(cè)產(chǎn)品,。
3.
SSTARFM多源數(shù)據(jù)時(shí)空融合方法
目前的時(shí)空融合算法大都是針對(duì)2種數(shù)據(jù)源的遙感數(shù)據(jù)進(jìn)行融合,,沒(méi)有充分利用現(xiàn)有多源數(shù)據(jù)的優(yōu)勢(shì),SSTARFM方法則基于目前我們常用的Sentinel2,、Landsat8/9和MODIS 3種不同傳感器的數(shù)據(jù)進(jìn)行融合,,提高了我們的監(jiān)測(cè)精度,。
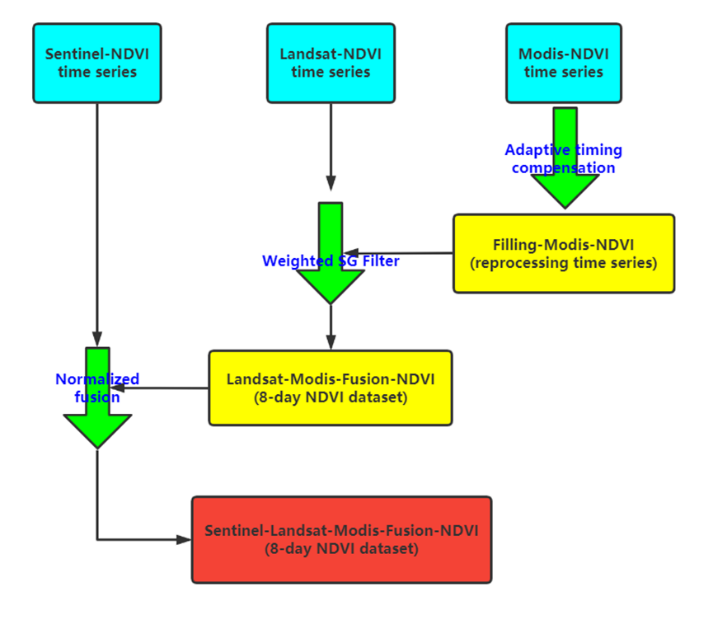
SSTARFM算法流程
該算法的特點(diǎn)是在填補(bǔ)空缺值的基礎(chǔ)上,,最大程度的保留了準(zhǔn)確的原始數(shù)據(jù)。為了實(shí)現(xiàn)這種效果,,需要對(duì)整個(gè)數(shù)據(jù)集經(jīng)歷兩次時(shí)空濾波處理,。時(shí)空濾波處理首先通過(guò)空間插值的方式填補(bǔ)單幅影像的空缺值,但這樣填補(bǔ)出的空缺值只考慮的空間上的連續(xù)性,,和真實(shí)值差異較大,。因此需要使用時(shí)間濾波,以插值出的空間值為參考計(jì)算出在時(shí)間上的合理值,。這種先空間后時(shí)間的方法既可以去除數(shù)據(jù)中的異常值的點(diǎn),,也可以在時(shí)空尺度上為空缺數(shù)據(jù)計(jì)算出一個(gè)相對(duì)合理的值。與STARFM算法不同的是,,我們?cè)诳臻g維度基礎(chǔ)上增加了時(shí)間尺度進(jìn)行補(bǔ)值,,增加了數(shù)據(jù)合理性和準(zhǔn)確度,而且這種方法在長(zhǎng)時(shí)間序列的數(shù)據(jù)重構(gòu)上,,隨著可參考的時(shí)間樣本增加,,構(gòu)建出的時(shí)序數(shù)據(jù)也會(huì)更加符合實(shí)際情況,精度更高,。
本方法在實(shí)際應(yīng)用的過(guò)程中,,對(duì)于MODIS低分辨率數(shù)據(jù),首先進(jìn)行一次時(shí)空濾波處理,,構(gòu)建出一個(gè)相對(duì)完整的數(shù)據(jù)產(chǎn)品,,其次采用卷積和圖像補(bǔ)值的方法,構(gòu)建Landsat和MODIS數(shù)據(jù)融合結(jié)果,,然后再進(jìn)行時(shí)空濾波處理,,保證了融合數(shù)據(jù)在時(shí)間和空間上的合理性,最后將Landsat8-MODIS融合結(jié)果和Sentinel2數(shù)據(jù)構(gòu)建回歸模型,,保證兩數(shù)據(jù)源的協(xié)同統(tǒng)一,。
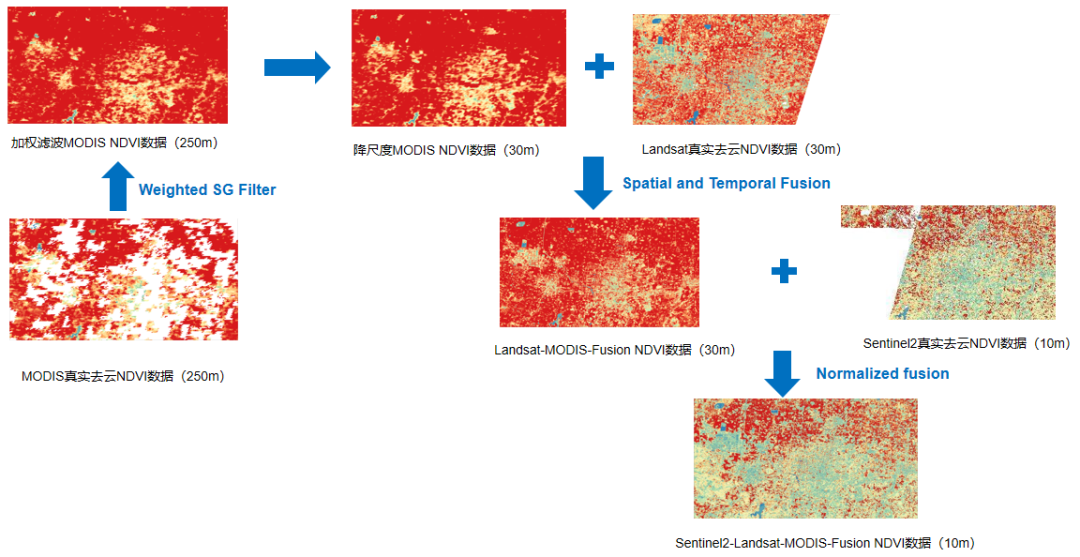
SSTARFM多源時(shí)空數(shù)據(jù)融合流程,注:示例數(shù)據(jù)為淄博市北部農(nóng)田區(qū)域2022年03月06日數(shù)據(jù)
其中,,雙立方(三次)卷積插值是我們進(jìn)行低分辨率數(shù)據(jù)降尺度的一個(gè)主要方式,。雙三次插值又叫雙立方插值,,用于在圖像中“插值”(Interpolating)或增加“像素”(Pixel)數(shù)量/密度的一種方法。其主要原理為:雙立方插值計(jì)算涉及到16個(gè)像素點(diǎn),,其中(i’, j’)表示待計(jì)算像素點(diǎn)在源圖像中的包含小數(shù)部分的像素坐標(biāo),,dx表示X方向的小數(shù)坐標(biāo),dy表示Y方向的小數(shù)坐標(biāo),,通過(guò)圖像16個(gè)像素點(diǎn)權(quán)重卷積之和即可計(jì)算得到新的像素值,。具體如下圖所示:
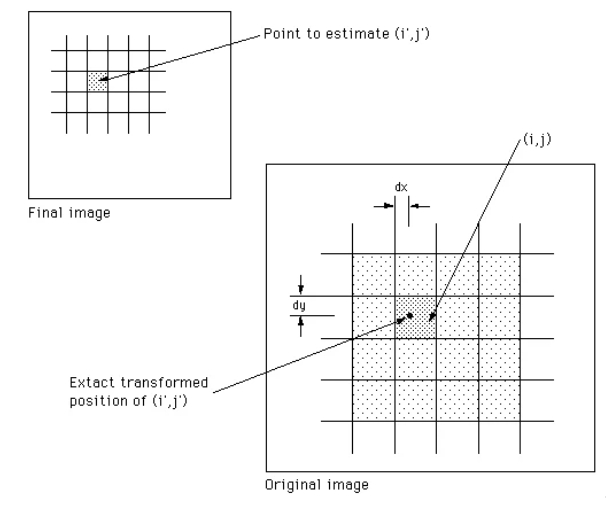
雙立方(三次)卷積插值方法
基于SSTARFM算法,我們已經(jīng)具備生產(chǎn)8天一期10m分辨率的NDVI數(shù)據(jù)的能力,,實(shí)現(xiàn)對(duì)作物區(qū)域進(jìn)行8天1次的生長(zhǎng)監(jiān)測(cè),,提高了農(nóng)情監(jiān)測(cè)的時(shí)間顆粒度,可以做到對(duì)異常情況的及時(shí)反映,,保障了農(nóng)民的生產(chǎn)和財(cái)產(chǎn)安全,,為政府部門(mén)的快速?zèng)Q策提供數(shù)據(jù)支撐。同時(shí),,SSTARFM時(shí)空融合算法解決了監(jiān)測(cè)研究中基礎(chǔ)觀測(cè)數(shù)據(jù)出現(xiàn)“空窗”的問(wèn)題,,能夠?yàn)檗r(nóng)業(yè)上作物面積監(jiān)測(cè)、長(zhǎng)勢(shì),、產(chǎn)量,、苗情、土壤墑情,、作物收割,、成熟度、氣象災(zāi)害,、蟲(chóng)害等監(jiān)測(cè)模型的構(gòu)建提供強(qiáng)有力地?cái)?shù)據(jù)支撐,,為農(nóng)田的精準(zhǔn)監(jiān)測(cè)提供保障。

神州信息遙感農(nóng)情監(jiān)測(cè)模型
4.
結(jié)語(yǔ)
在當(dāng)前單一傳感器數(shù)據(jù)不能滿足各領(lǐng)域動(dòng)態(tài)監(jiān)測(cè)對(duì)于高時(shí)空分辨率遙感數(shù)據(jù)需求的情況下,,如何融合遙感數(shù)據(jù)綜合利用多源數(shù)據(jù)的特性和優(yōu)勢(shì),,具有重要的理論意義和應(yīng)用價(jià)值。SSTARFM多源數(shù)據(jù)融合方法是一種具有良好性能的遙感時(shí)空融合算法,,可以解決當(dāng)前光學(xué)遙感數(shù)據(jù)空間分辨率和時(shí)間分辨率上相互制約的問(wèn)題,,其發(fā)展及應(yīng)用前景十分廣闊。